
Lolol Chen
Automation Engineering M.Sc. Student | Hobby Industrial Designer
Automation Engineering M.Sc. Student | Hobby Industrial Designer





Hi there, welcome to my site!
I’m currently pursuing my Master’s at RWTH Aachen, Germany, and working on my thesis at DLR in Augsburg. Previously, I worked at Auxsys as a hardware designer for exoskeletons, and with Team Sonnenwagen Aachen, building solar racing cars.
Before that, I spent quite a bit of time at FabLab St. Pauli in Hamburg, where many of my cool stories begin :D
Feel free to contact me for a coffee chat if you're interested in any of my projects!
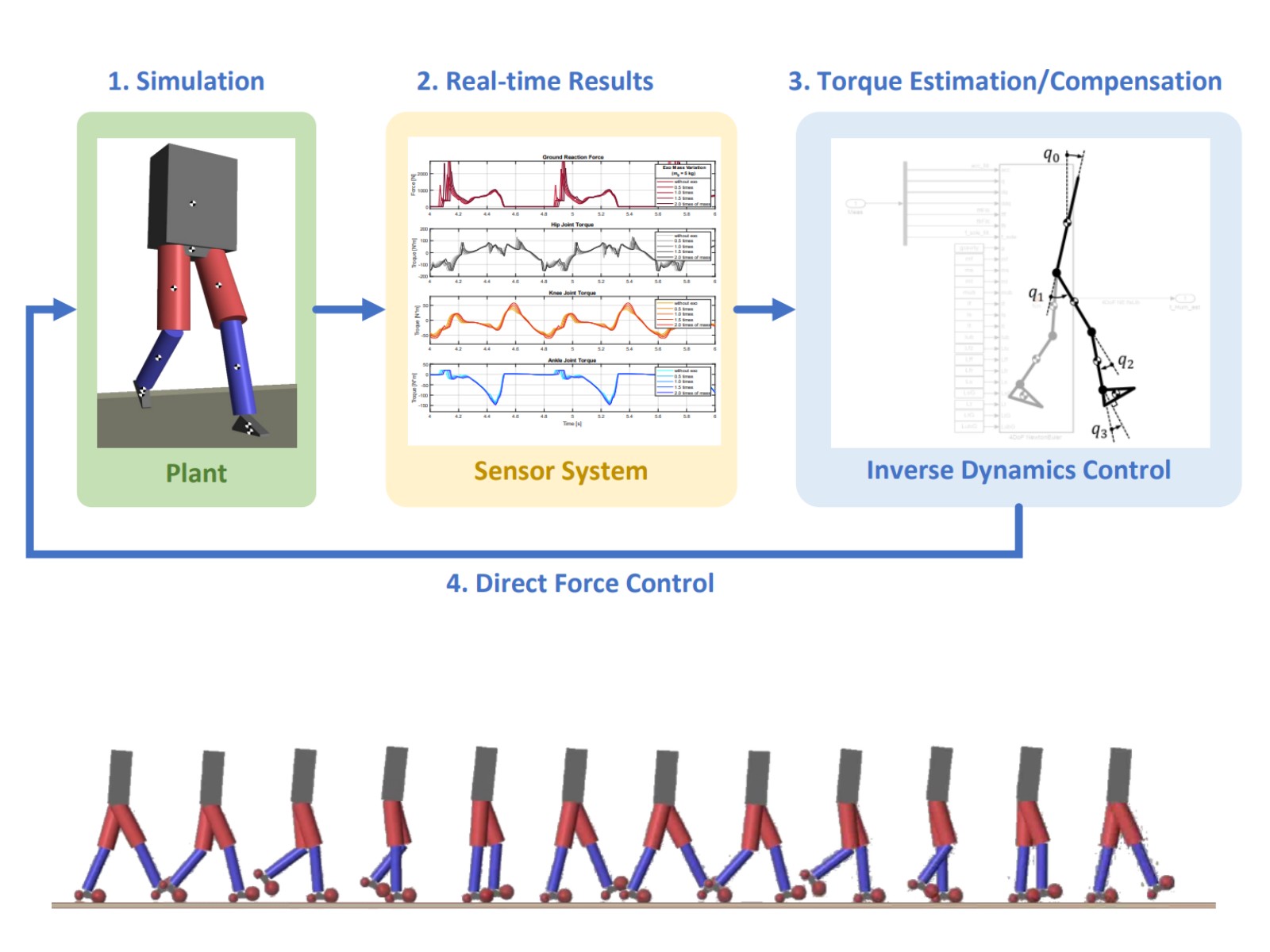
Bachelor Thesis: Modeling, Simulation, and Control of an Lower Limb Exoskeleton for Human Walking Augmentation
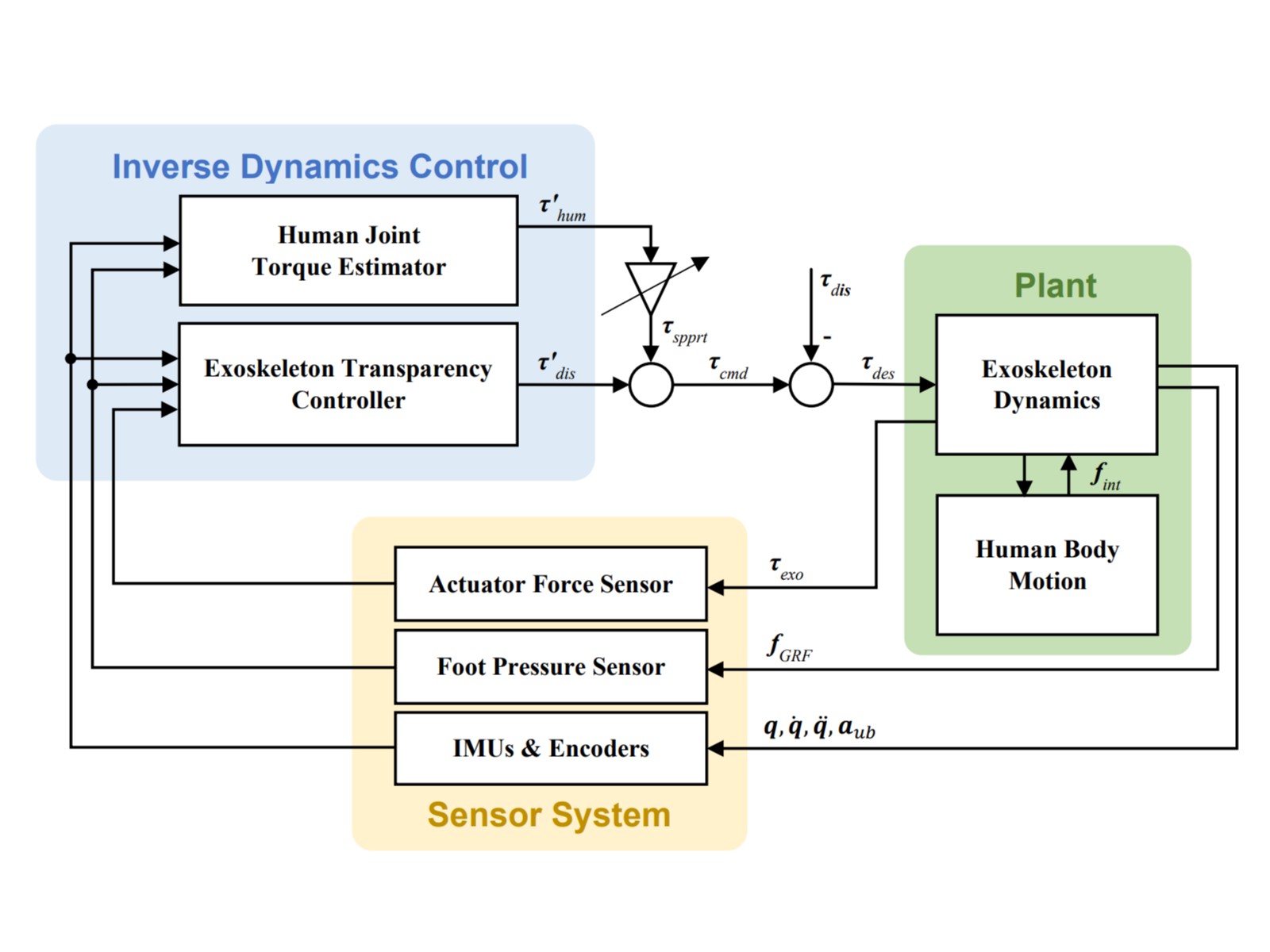
In this thesis, a human locomotion model based on multibody dynamics is developed in Simulink/Simscape, which resulted a natural walking motion and provide a simulation framework for human-exoskeleton interaction. Upon that, a active powered lower limb exoskeleton is added in the model and a direct force controller consist of two sub-systems are introduced:
Using the human inverse dynamic model, the Human Joint Torque Estimator calculate the real time muscular torques based on the measured lower limb joint kinematics and ground reaction forces. On the other hand, Exoskeleton Transparency Controller compensates for the undesired interaction forces caused by the mass, inertial, and friction from the robotic dynamics.
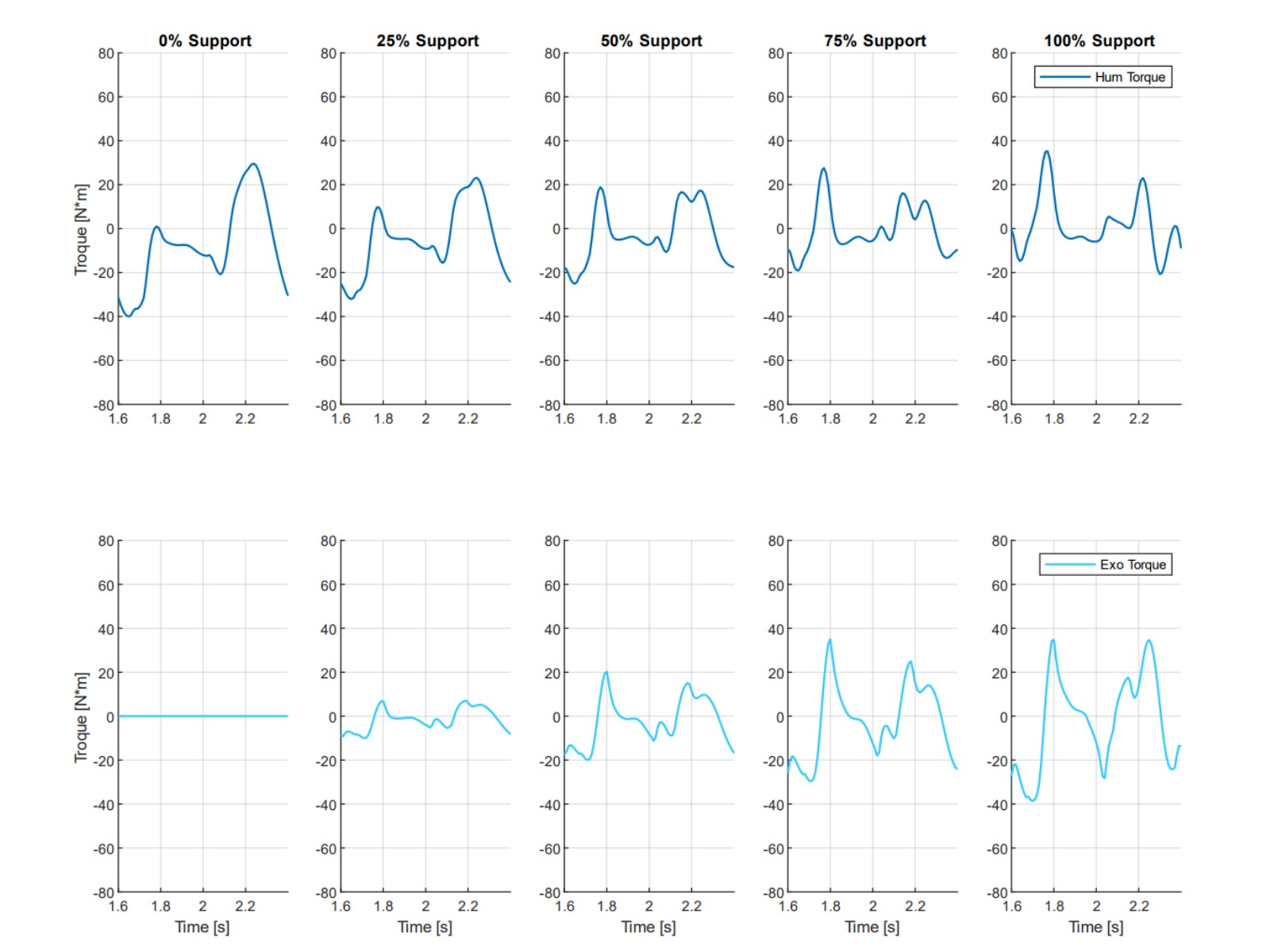
By combining the two torques with a support factor, the model-in-the-loop simulation results show promising augmentation efficacy by effectively reducing the requirement of human muscular torque.



The third-generation Sonnenwagen is an asymmetric three-wheeled catamaran that embodies optimum efficiency-oriented design. Despite the challenging COVID-19 conditions, the vehicle was successfully built in 2021 and raced in the adventurous Sahara desert in Morocco.
My contributions to the project include:



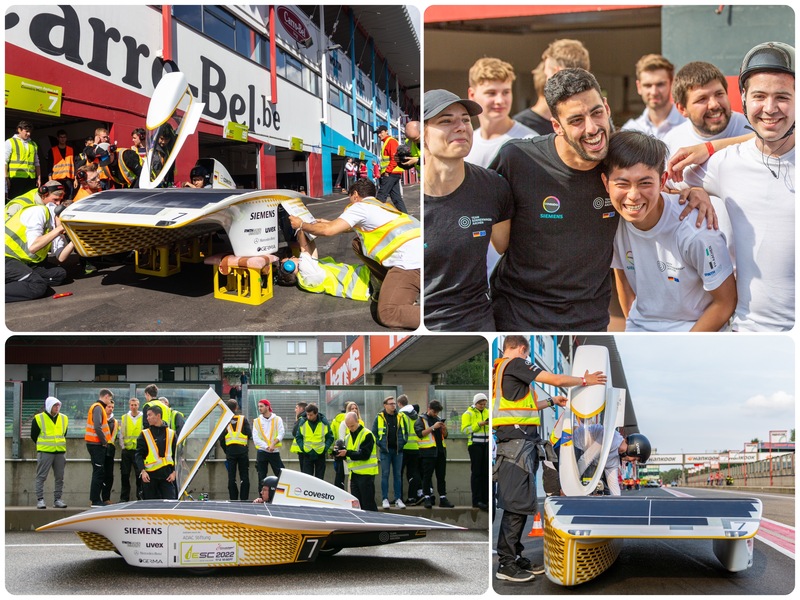
The Covestro Sonnenwagen was the first solar racing vehicle I ever built after joining the exciting student initiative, Team Sonnenwagen Aachen. Collaborating with over 40 dedicated members, we designed and constructed the most energy-efficient solar-powered vehicle from scratch in just one and a half years, and successfully finishing the epic solar racing event in the Australian Outback covering 3022 km.
My responsibilities included:
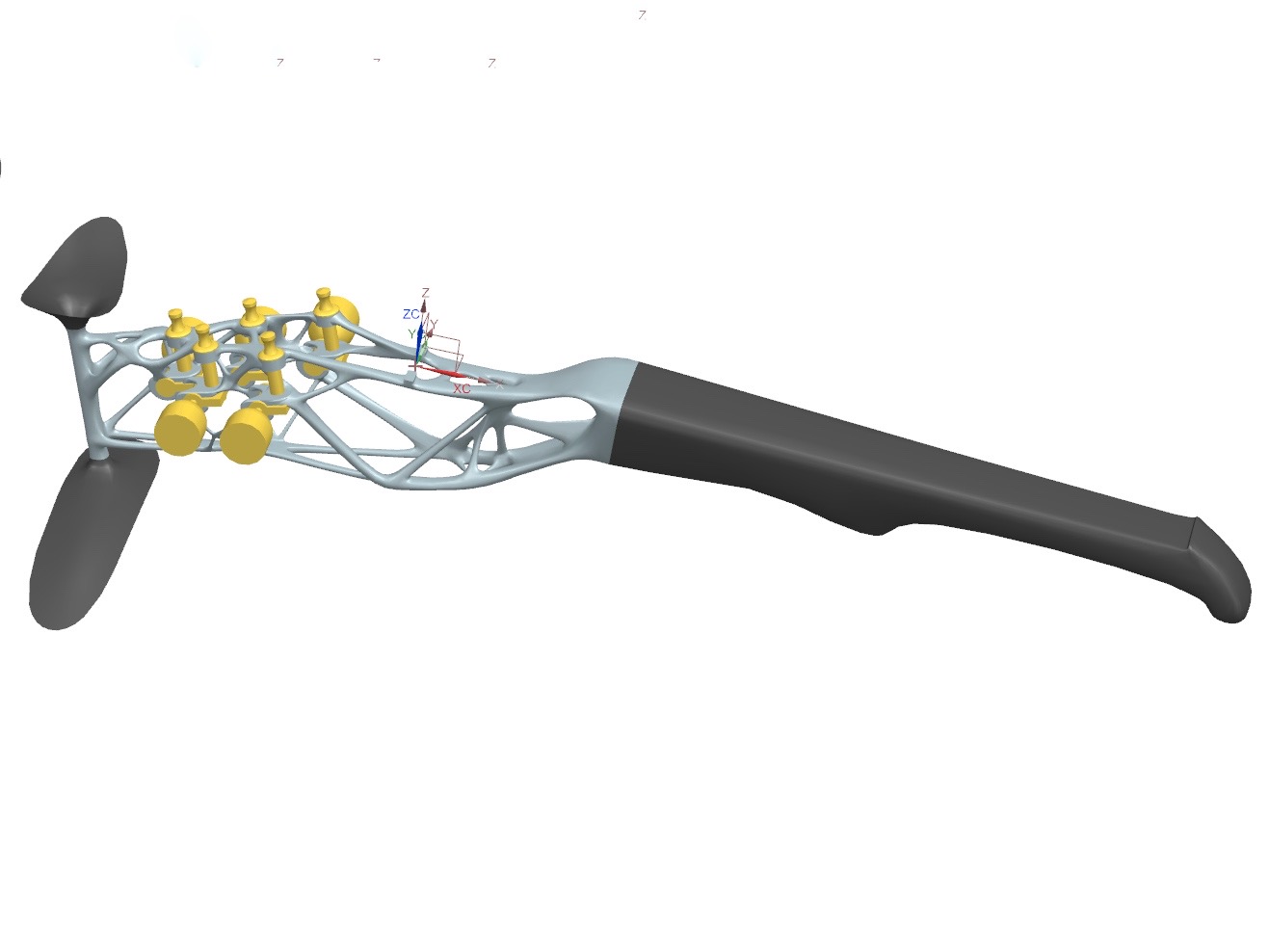
Body
- Lightweight design using topology optimization
- (almost) Overhang-free design for 3D-printing
- Manufacturing: Laser Powder Bed Fusion
- Material: AlSi10Mg
- Weight: 156g
Neck
- Material: carbon fiber composite
Rest
- Angle adjustable design
- Material: CFRP

Auxsys GmbH focuses on augmenting the emergency and rescue sector with highly dynamic and agile powered exoskeletons. As part of the team developing the company's 2nd generation system, I was responsible for designing and producing the wearable robot's structural hardware, with a focus on biomechanics, weight reduction, and integrated functionalities.
Key features of the design included:
Mini Thesis: Analysis of the Potential of Active Aerodynamics for a Solar Vehicle
- Conducted CFD simulations to analyze the effect of an active shape-variable vertical trailing edge on the sailing performance and drag reduction of a bullet-shaped solar vehicle.
- Designed and built a prototype of a morphing trailing edge using carbon fiber composite (CFRP) and polyurethane foam to demonstrate the feasibility of a ridged but shape-adaptive structural concept.

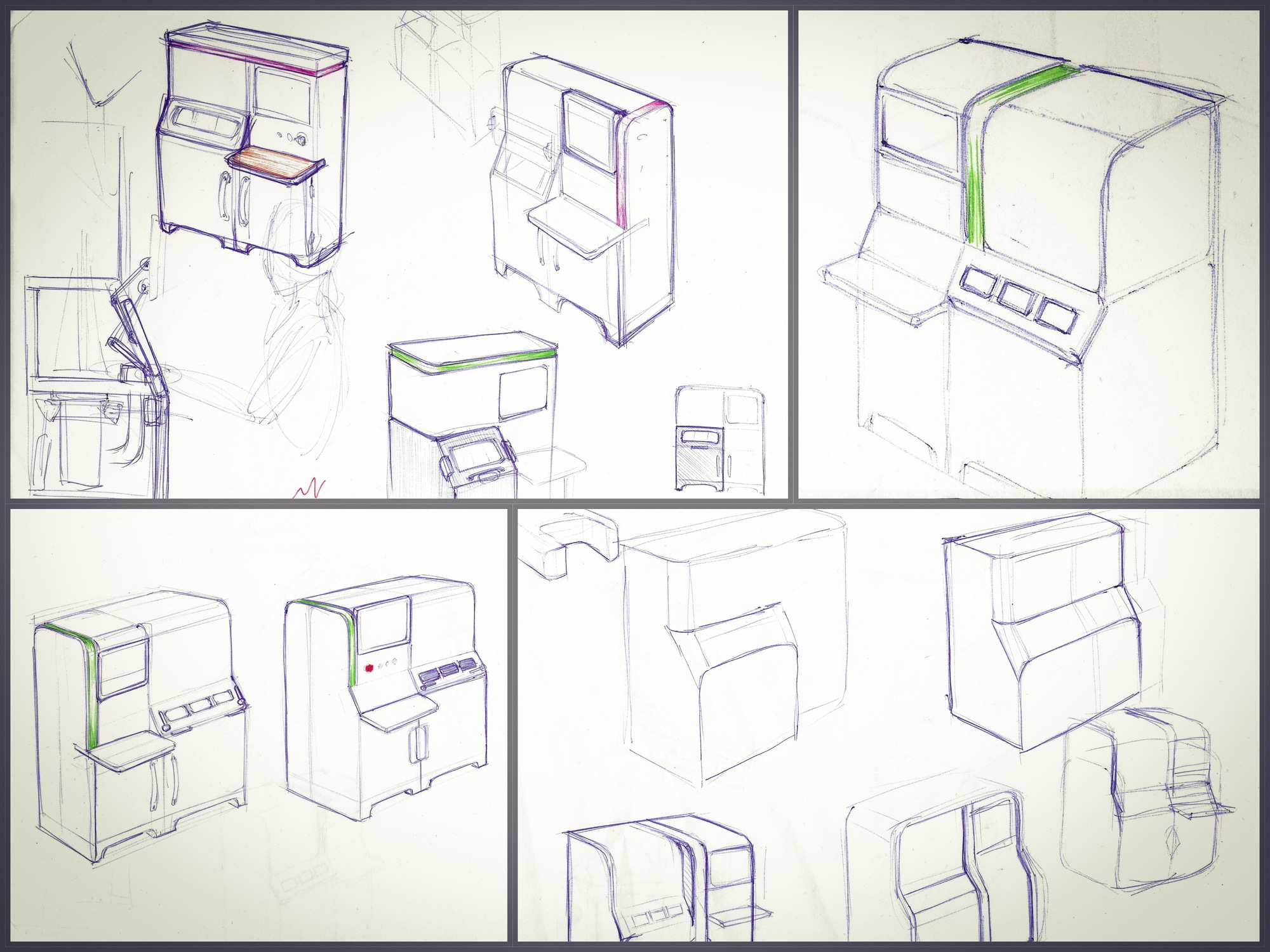
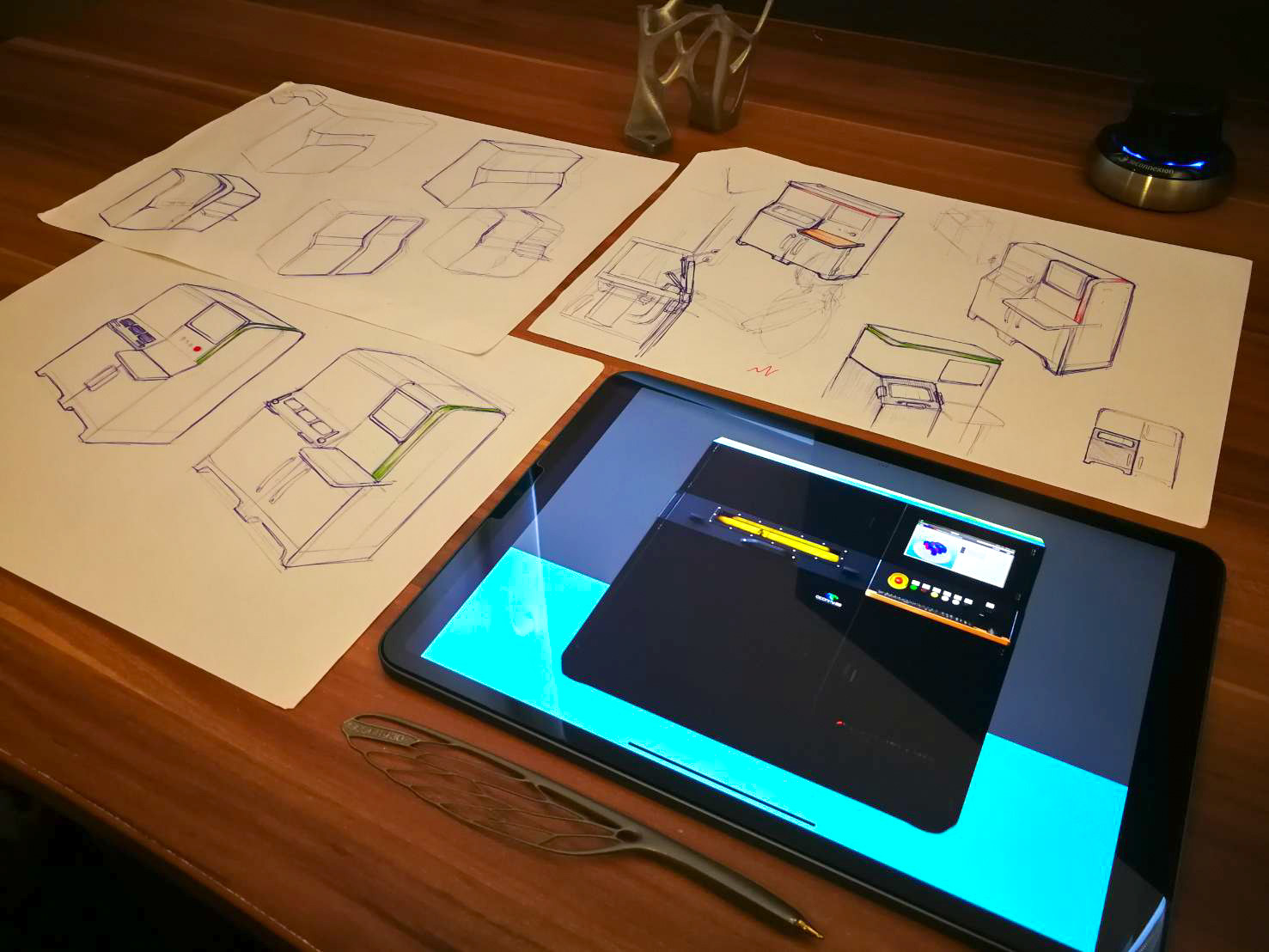
The AconityMICRO is a compact metal 3D printer designed specifically for MICRO L-PBF process, featuring a small laser spot size of 40µm and a thickness resolution of 10µm. Its clean and compact design ensures a user-friendly experience, making it the perfect choice for serial production of individual high resolution parts. As a contributor to the initial design concepts, I provided my skills in industrial design to help shape the final product.

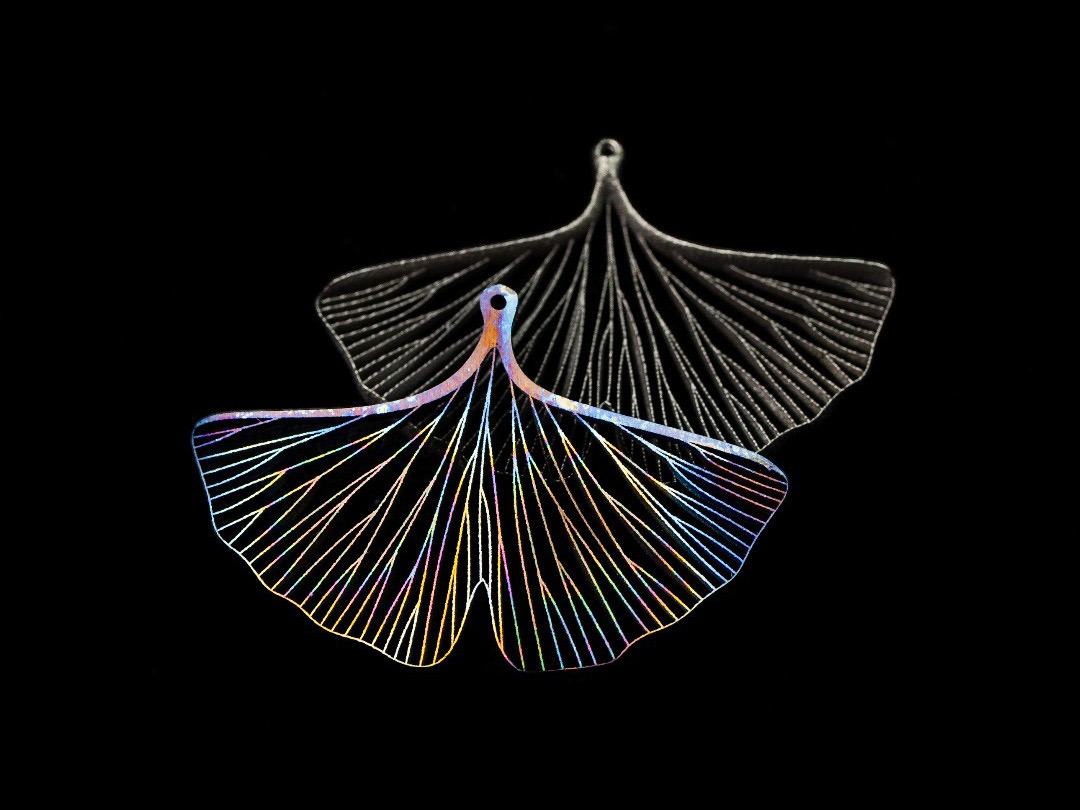
Experience the natural elegance of delicate vein patterns, meticulously crafted using a single laser beam melting technique to replicate the ultra-thin-walled structure of a ginkgo leaf.
Encased in a thin layer of titanium oxide, these earrings glow with enchanting colors through thin-film interference, delighting the wearer with a graceful interplay of light.
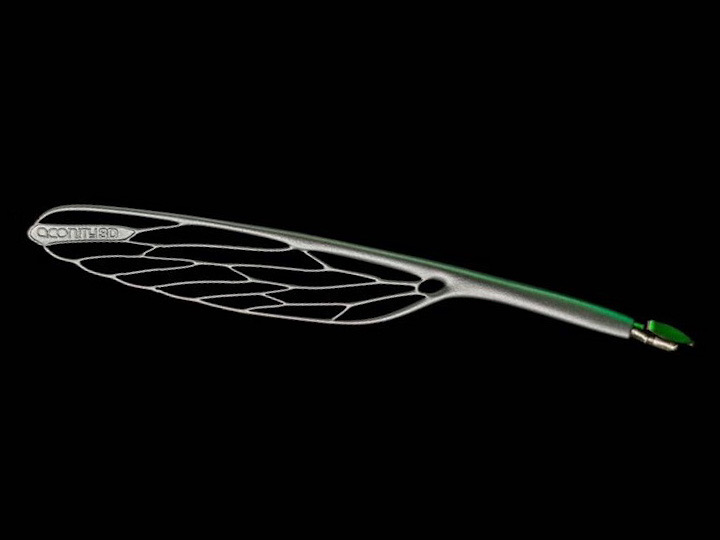
Leverage the capabilities of metal additive manufacturing to craft this sleek, support-free titanium feather pen, inspired by the bionics of a cicada wing.



In just 24 hours, we created a vibration vest during a hackathon to provide humans with an enhanced sense of their environment.
By using computer vision (object and facial recognition) from two webcams, and 10 vibration motors that surround the chest, our vest generates specific vibration patterns to enable users to feel the orientation, velocity, and type of objects around them. From moving objects to facial expressions, this vest provides an innovative way to perceive the world around you.
Our wearable device has the power to transform the lives of visually- or hearing-impaired individuals, enabling them to "feel" the surrounding objects and ambient sounds. It has endless practical applications, from remote vehicle detection to navigation, and even facial expressions.
Our team was inspired by two TED talks by Pranav Mistry and David Eagleman, which drove us to create this magnificent invention in record time.

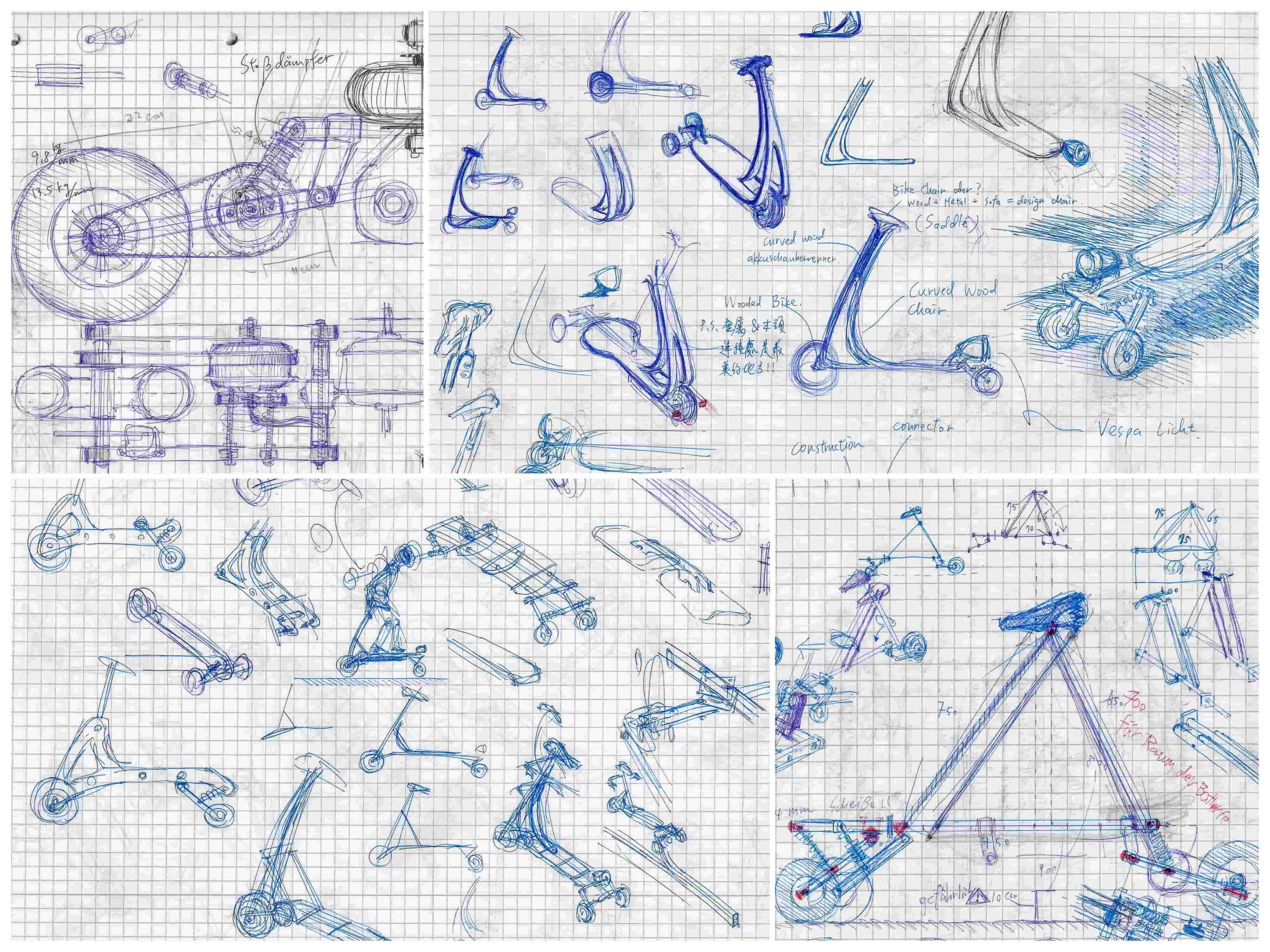

ERoller ERoller
FTC robot featuring a unique lifting mechanism capable of extending to 5 times its original height.
Open-source quadruped robot project built with an OpenCM9.04 controller and 12 Dynamixel XL-320 servos.
As a graduate student at my high school, I had the opportunity to help decorate our school for the graduation ceremony, transforming it into a Universal Studios Theme Park. For our graduation, we chose Avatar as the theme to set up the entire event space. However, this year, we didn't just replicate the mystical Pandora jungle and floating Hallelujah Mountains with our skillful handicraft; we aimed to take it a step further and recreate an interactive experience with the Pandoran biosphere using a variety of creative technologies, such as light and sound effects and vivid creature models equipped with motorized mechanisms.
With this concept in mind, I came up with the idea to reconstruct the wondrous scene where Jake encounters a bunch of luminescing woodsprites in the dark jungle, using the Kinect skeletal tracking SDK. I approached two of my most talented friends, Vincent Fan and Yi-Ting Tu, to help develop this interactive art with their solid CS skills. After a few days of hardcore programming and debugging, we were thrilled to make every event participant even more immersed in Avatar's adventurous journey.
In fact, Vincent Fan even created a web version of the project, allowing you to play with the Woodsprites using only your mouse!

RC flying robot inspired by Festo's AirJelly and the Atokirina from the movie Avatar.